YCT श्रृंखला विद्युत चुम्बकीय गति विनियमन मोटर
उत्पादन अवलोकन
YCT शृङ्खलाको इलेक्ट्रोम्याग्नेटिक स्पीड मोटर एक AC स्थिर टर्क चर गतिको मोटर हो। इलेक्ट्रोम्याग्नेटिक क्लच, ड्राइभ मोटर र ट्याचोजेनेरेटरद्वारा स्लिप, सामान्यतया JD, TXZ, CTK शृङ्खला नियन्त्रकको साथमा एक्सचेन्जको सेटबाट बनेको भेलोमिट्री नकारात्मक प्रतिक्रिया प्रणाली स्टेपलेस हुन्छ। ड्राइभ, एक फराकिलो गति चिकनी स्टेपलेस गति नियमन, यो चीन मा छ, एकीकृत डिजाइन नयाँ विद्युत चुम्बकीय मोटर उच्च दक्षता, कम आवाज, कम्पन, उच्च विश्वसनीयता, र सौन्दर्य उपस्थिति को फाइदाहरु छन्। र राष्ट्रिय अन्तर्राष्ट्रिय इलेक्ट्रोटेक्निकल आयोग ( IEC) मापदण्डहरू। श्रृंखला इलेक्ट्रोम्याग्नेटिक गभर्नर मोटर व्यापक रूपमा कपडा, मुद्रण र रंगाई, विभिन्न प्रकारका खाना, रसायन, कागज, सिमेन्ट, रबर, प्लास्टिक, केबल, धातु विज्ञान, खनन र स्थिर टर्क स्टेपलेस स्पीड उपकरणहरूको अन्य क्षेत्रहरूमा लागू हुन्छ, विशेष गरी। फ्यानहरू, पम्पहरू, लोड टर्क घट्ने अवसरहरूका लागि, महत्त्वपूर्ण ऊर्जा बचत प्रभाव प्राप्त गर्न फ्लावरको दबाबमा परिवर्तनहरूमा समायोजनको गतिद्वारा नियन्त्रित।
विद्युत चुम्बकीय गति विनियमित एसिन्क्रोनस मोटर साधारण गिलहरी पिंजरा एसिन्क्रोनस मोटर, इलेक्ट्रोम्याग्नेटिक स्लिप क्लच र बिजुली नियन्त्रण उपकरण मिलेर बनेको छ।एसिन्क्रोनस मोटर प्राइम मूभरको रूपमा प्रयोग गरिन्छ।जब यो घुमाउँछ, यसले क्लचको आर्मेचरलाई सँगै घुमाउन ड्राइभ गर्दछ।विद्युतीय नियन्त्रण उपकरण एक उपकरण हो जसले स्लिप क्लचको उत्तेजना कुण्डलीको उत्तेजना प्रवाह प्रदान गर्दछ।इलेक्ट्रोम्याग्नेटिक स्लिप क्लच मुख्यतया यहाँ प्रस्तुत गरिएको छ, र यसको संरचना चित्र 2-19 मा देखाइएको छ।यसमा आर्मेचर, चुम्बकीय ध्रुव र उत्तेजना कुंडल समावेश छ।आर्मेचर कास्ट स्टिलले बनेको बेलनाकार संरचना हो, जुन गिलहरी केज एसिंक्रोनस मोटरको घुम्ने शाफ्टसँग जोडिएको हुन्छ, जसलाई सामान्यतया सक्रिय भाग भनिन्छ;चुम्बकीय ध्रुवलाई पंजाको संरचनामा बनाइन्छ र लोड शाफ्टमा स्थापित गरिन्छ, जसलाई सामान्यतया संचालित भाग भनिन्छ।ड्राइभिङ भाग र संचालित भाग बीच कुनै मेकानिकल जडान छैन।जब उत्तेजित कुण्डल वर्तमानबाट गुजर्छ, एक चुम्बकीय क्षेत्र उत्पन्न हुन्छ, र पंजा संरचनाले चुम्बकीय ध्रुवहरूको धेरै जोडी बनाउँछ।यस समयमा, यदि आर्मेचरलाई गिलहरी पिंजराको एसिन्क्रोनस मोटरद्वारा तानियो र घुमाइयो भने, यसले चुम्बकीय क्षेत्र अन्तरक्रियालाई काट्छ र टर्क उत्पन्न गर्दछ, त्यसैले संचालित भागको चुम्बकीय ध्रुव ड्राइभिंग भागको आर्मेचरसँग घुम्नेछ।पहिलेको गति पछिल्लोको भन्दा कम छ, किनभने आर्मेचर र चुम्बकीय क्षेत्र बीच सापेक्ष आन्दोलन हुँदा मात्र आर्मेचरले बलको चुम्बकीय रेखा काट्न सक्छ।चुम्बकीय ध्रुव आर्मेचरसँग घुम्छ भन्ने सिद्धान्त र सामान्य एसिन्क्रोनस मोटरको रोटर स्टेटर विन्डिङको घुम्ने चुम्बकीय क्षेत्रसँग सर्छ भन्ने सिद्धान्तमा कुनै आवश्यक भिन्नता छैन।भिन्नता यो हो कि एसिन्क्रोनस मोटरको घुमाउने चुम्बकीय क्षेत्र स्टेटर विन्डिङमा थ्री-फेज एसी द्वारा उत्पन्न हुन्छ, जबकि इलेक्ट्रोम्याग्नेटिक स्लिप क्लचको चुम्बकीय क्षेत्र एक्साइटेशन कोइलमा डीसी करन्टद्वारा उत्पन्न हुन्छ, र आर्मेचर घुमाउँछ। , यसले चुम्बकीय क्षेत्र घुमाउने भूमिका खेल्छ।1 - प्राइम मूभर, 2 - काम गर्ने एयर ग्याप, 3 - मुख्य शाफ्ट, 4 - आउटपुट शाफ्ट, 5 - चुम्बकीय पोल, 6 - आर्मेचर इलेक्ट्रोम्याग्नेटिक स्लिप क्लचको मेकानिकल विशेषताहरू लगभग निम्न अनुभवजन्य सूत्रद्वारा व्यक्त गर्न सकिन्छ: n = n0-kt2 / i4f, जहाँ: N0 - क्लचको ड्राइभिङ भागको गति (गिलहरी केज मोटर);N - क्लच को संचालित भाग (चुम्बकीय ध्रुव) को गति;यदि
पुस्तकालय रैखिक मोटर - Dongfang मोटर विज्ञापन प्रत्यक्ष रूपमा जापान को Dongfang मोटर द्वारा संचालित छ।रैखिक मोटर पातलो, उच्च कठोरता र उच्च परिशुद्धता छ।रैखिक मोटर सीधा विशेष नि: शुल्क सफ्टवेयर संग सम्बन्धित छ, विवरण हेर्नुहोस् >
- वर्तमान उत्तेजना;K - क्लच संरचना सम्बन्धित गुणांक;T - क्लच को विद्युत चुम्बकीय टोक़।स्थिर रूपमा चल्दा, लोड टर्क क्लचको विद्युत चुम्बकीय टोकक बराबर हुन्छ।
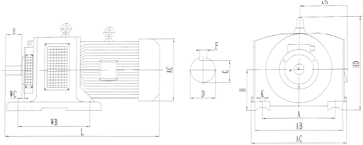
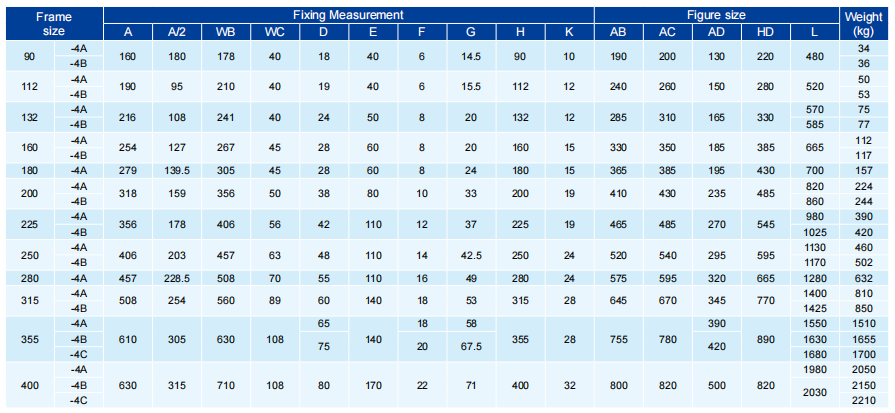
स्थापना आयाम
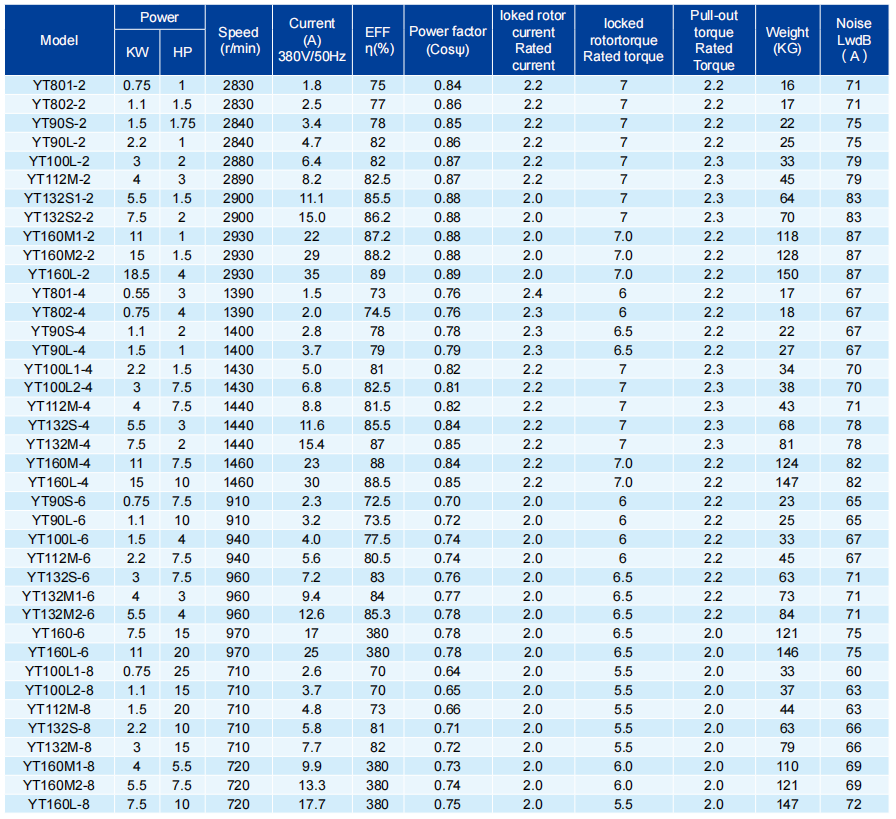
प्राविधिक प्यारामिटर
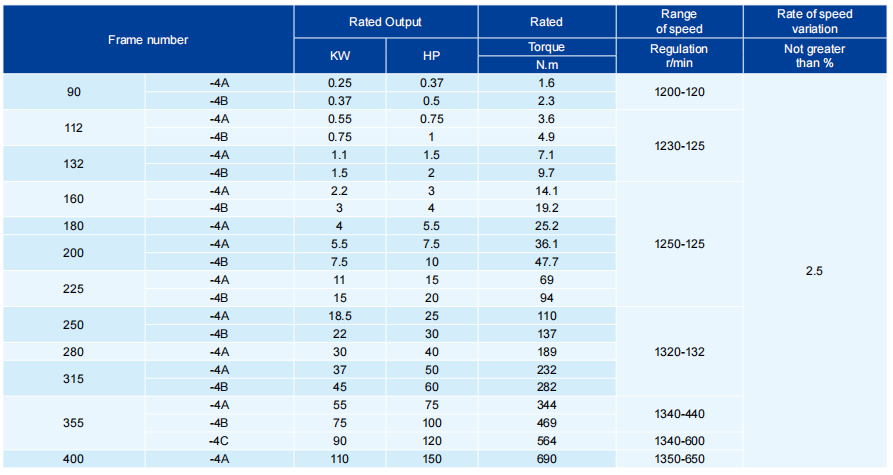

प्राविधिक प्यारामिटरहरू